Fusion of In-Situ Network and Auxiliary Information: A Probabilistic Approach
PhD Viva Voce Presentation
Tuesday, 21 April, 2026
RQ0: Systematic Review
Method: Systematic Review of 80+ papers across probabilistic and deterministic fusion methods
Key finding: No unified probabilistic framework exists — deterministic methods dominate, uncertainty is largely ignored

RQ1: FusionGP
Method: Gaussian Process framework integrating TROPOMI satellite observations and LUR covariates with in-situ reference data
Key finding: High-resolution probabilistic NO₂ maps with calibrated uncertainty estimates at every location
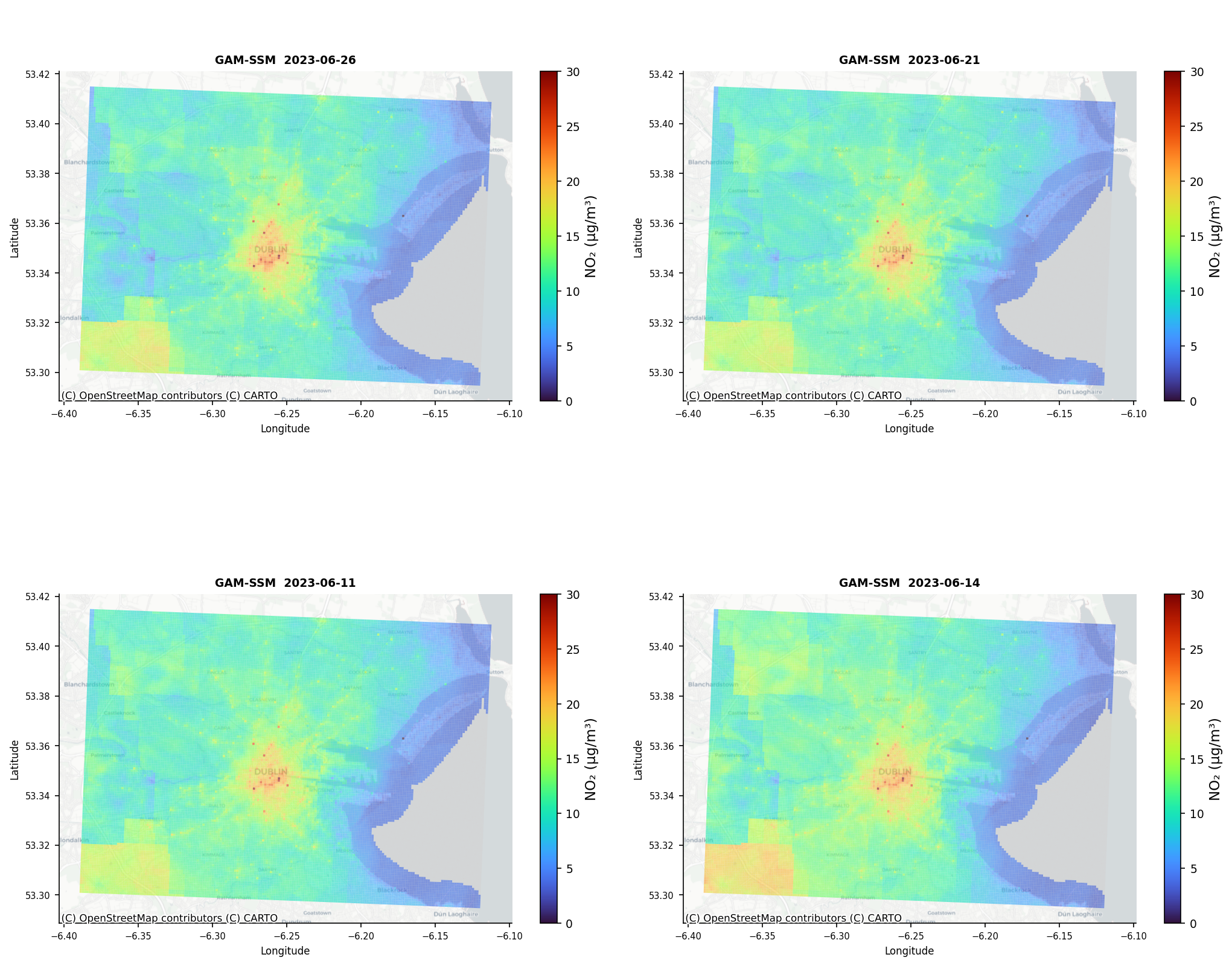
RQ2: Hybrid GAM–SSM
Method: Hybrid Generalised Additive Model combined with State Space formulation embedding LUR
Key finding: Dynamic prediction with principled uncertainty — model updates as observations arrive. Currently revising with wind-sector based covariates.
RQ3: Transfer Learning
Method: Transfer learning applied to pre-trained probabilistic fusion models across different urban deployments
Key finding: Probabilistic structure transfers well even when city morphology differs — reducing city-specific training data requirements substantially
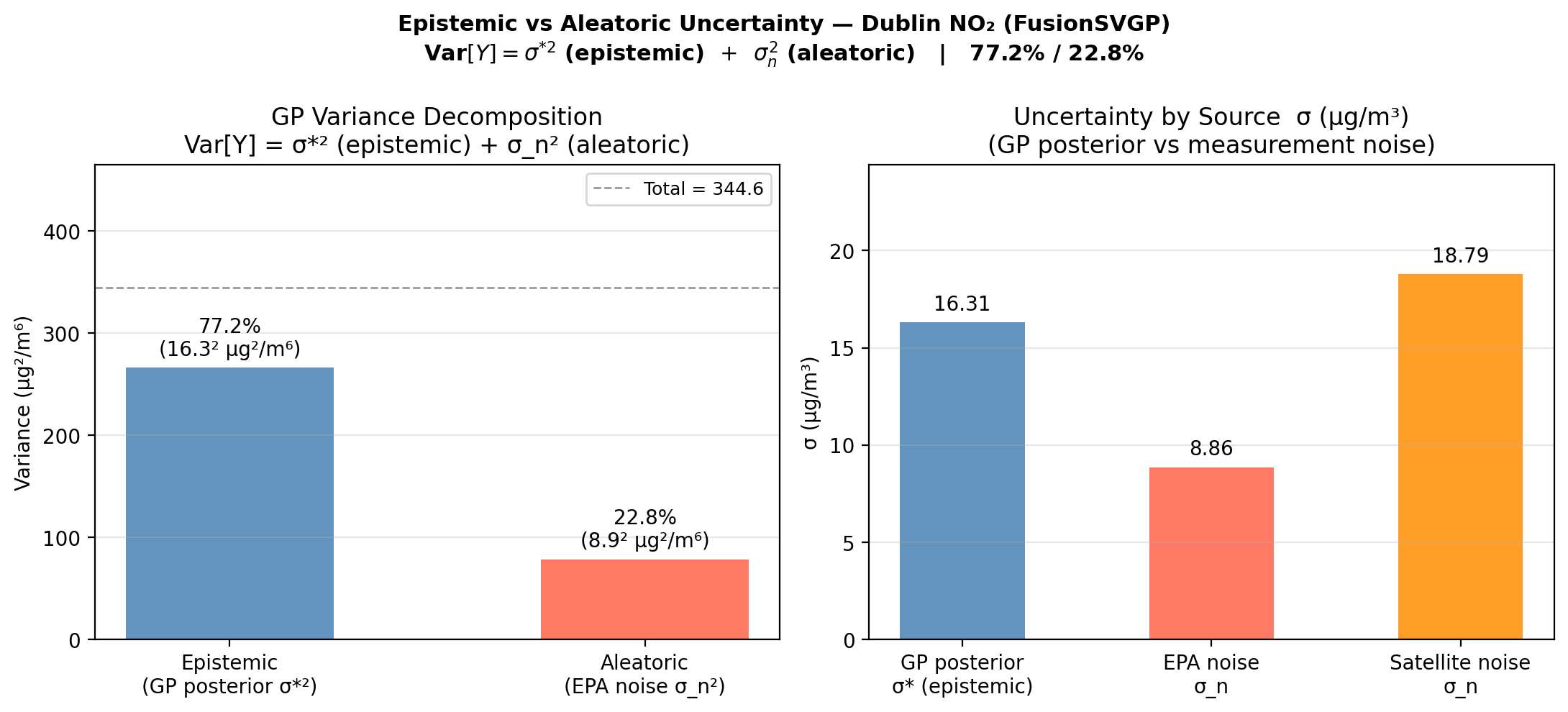
RQ4: Uncertainty Quantification
Method: Gaussian Surrogate Uncertainty Quantification Model — propagating sensor noise, retrieval error, and model uncertainty end-to-end
Key finding: Source-decomposed uncertainty enables transparent, decision-relevant communication of what the model does and does not know